

23102計画型捜索レーダー《Zvezdy》
この記事はStormworks 第2 Advent Calendar 2023 1日目の記事です。
捜索レーダーを作りました!
埼玉地上軍では、以前制作した9K330 トールの全面的改良、またZSU-23-4 シルカや2K22 ツングースカといった防空車両の新造を進めています。
しかしその過程で、以前のレーダーシステムやレーダーの配置・駆動方式を見直す必要が出てきました。
宇宙DLCのリリースに前後して、ミサイルやロケットといった、ビークル本体から分離可能なPhysics Bodyが別個のビークルとして扱われるようになりました。 これにより、防空車両に搭載されたミサイルが車両自身のレーダーで検知されたり、車両自身のレーダーを遮るようになったのです。
特に、Physics Bodyやプレイヤー、NPCなどがそれより奥の物体の検出を遮ってしまう"遮蔽効果"は深刻で、レーダーの配置を根本的に変更し、また駆動方式も変更する必要が生じたので、捜索レーダー・レーダーマップのコードを最新の知見に基づいてリファクタリングするとともに、別途捜索レーダーの駆動を制御することとしました。
23102計画型捜索レーダー《Zvezdy》
《Zvezdy》捜索レーダーは、23102型レーダー装置の中核をなす捜索レーダーです。 多様な地上車両に搭載すべく、1基のレーダーで全周を監視することを目指しました。
Stormworksの新型レーダーは、プロパティから適切なモードを選択することで、レーダー自身の姿勢を変えずとも指向方位を変化させることができます。 Clockwise・Anticlockwiseモードではそれぞれ時計回り・反時計回りに指向し、Sweepモードでは指定した角度で首振り様に指向することができるのですが、回転速度には限界があり(XML編集を許せば際限なく引き上げることができますが)、また回転速度をスポーン後に変更することができません。
そこで、さらなる走査速度を求め、レーダーのモードはStaticのまま、レーダーそのものをPivotで高速回転させることで全周捜索を実現することがあります。 これを個人的にDynamicモードと呼んでおり、回転速度を柔軟に変更したり、ZSU-23-4のように追尾レーダーに捜索レーダーを兼任させることが可能です。
《Zvezdy》捜索レーダーでは、レーダーの駆動モードを問わずレーダーを運用できるよう工夫しているほか、Dynamic捜索レーダーを駆動させるための制御マイコンも並行して開発しました。
レーダーマイコンの概略
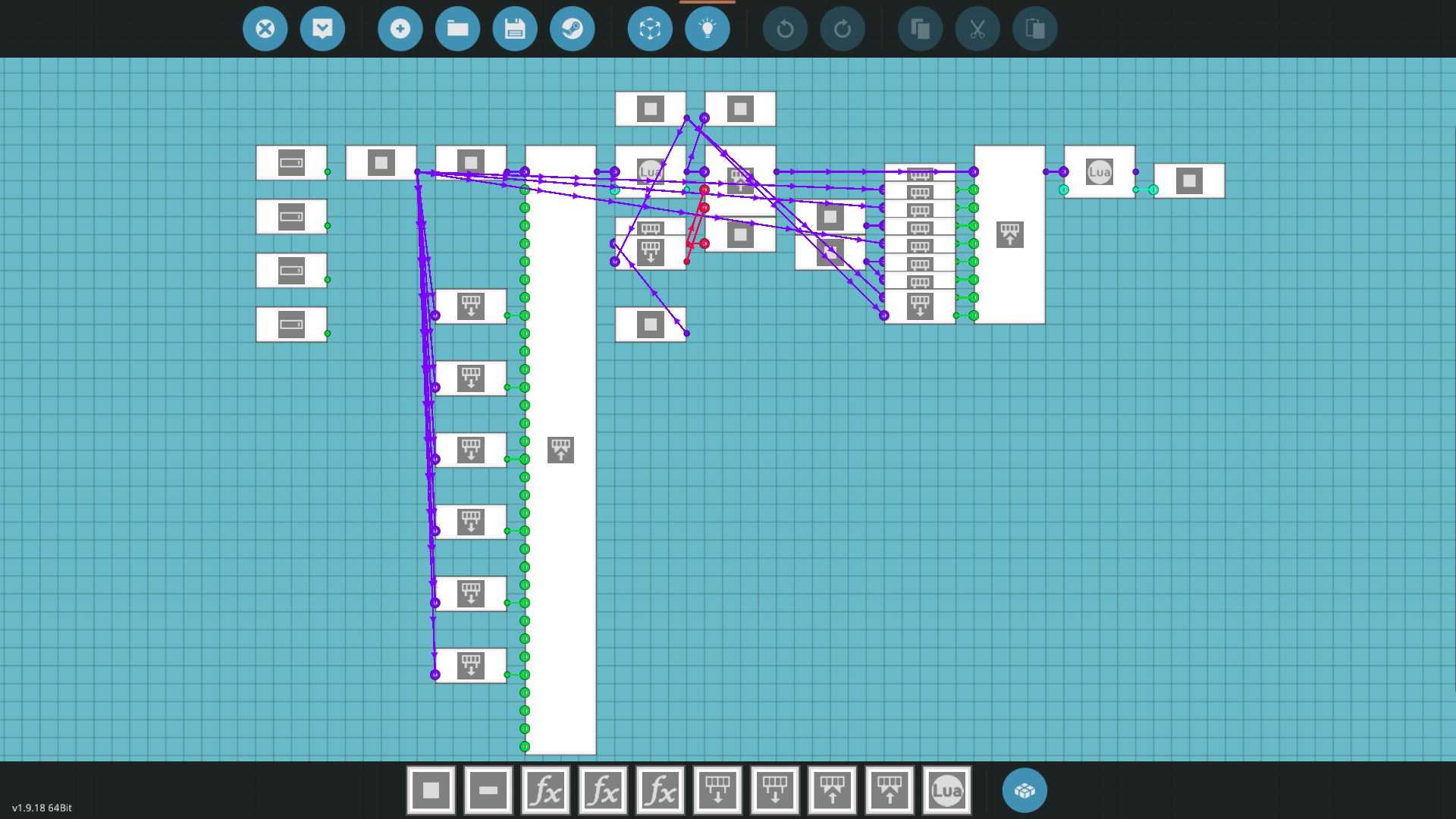
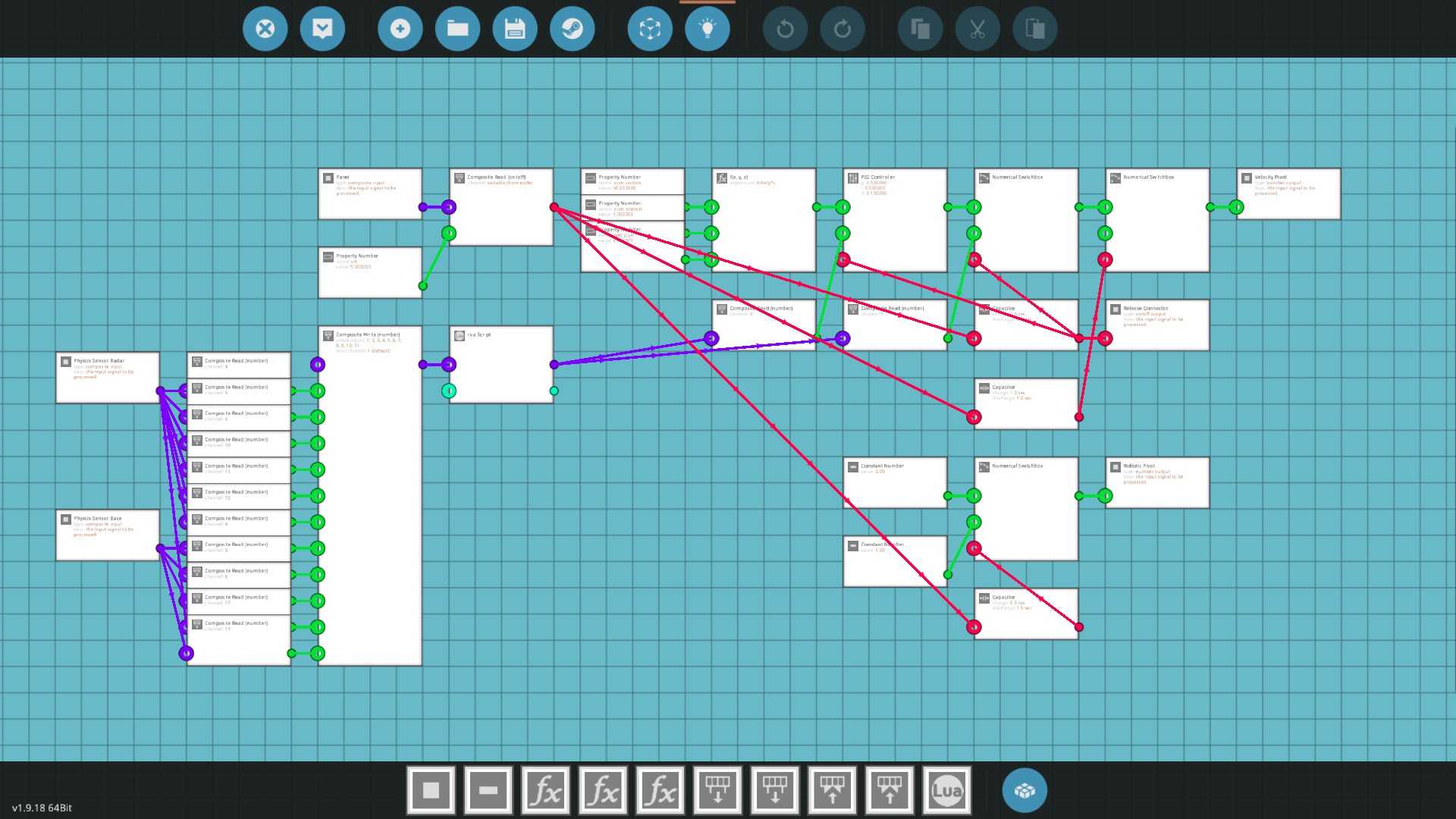
レーダー本体のマイコンはこのようになっています。
まず、レーダーから入力されたコンポジット信号の8,12,16,20,24,28Chを、Physics Sensorで取得したレーダーの位置と姿勢で上書きし、LuaブロックAに入力します。
LuaブロックAは、レーダーが得た目標距離・方位、Physics Sensorで得たレーダーの位置・姿勢を入力すると、目標のワールド座標を出力します。
その後、余ったChをレーダー自身の位置や方位、タッチパネルの情報、追尾レーダーからの入力などで改めて上書きし、LuaブロックBに入力します。
LuaブロックBは、マップ・目標位置を描画するほか、追尾レーダーへのハンドオーバーも担当しています。
Luaブロック A
LuaブロックAでは、オイラー角とクォータニオンの相互変換ライブラリを利用して、レーダーが得た目標距離・方位からワールド座標を計算しています。
Stormworksの新型レーダーは目標との位置関係を必ずしも毎tick計算しているわけではなく、その代わりにある間隔で距離・方位の真値を計算し、次の検出間隔までは同じ真値・異なるノイズで距離・方位を出力しています。 検出間隔(tick)は有効レンジ(m)を2000で割り、切り上げた値になります。
そのため、レーダーの出力が同じ真値を共有している間はレーダーの姿勢を更新せず、真値が更新されたときにだけPhysics Sensorから姿勢を計算するようにしています。
また、お祈り程度のノイズ対策として、同じ真値を共有している出力をワールド座標系で平均しています。
参考までに、使用しているコードの全文を掲示します。
-- Saitama Army project 23102 "Zvezdy" Radar Complex
i,o,p,m=input,output,property,math
IB,IN,OB,ON,PN,PB=i.getBool,i.getNumber,o.setBool,o.setNumber,p.getNumber,p.getBool
S,C,T,AS,AT,AB,pi,pi2=m.sin,m.cos,m.tan,m.asin,m.atan,m.abs,m.pi,2*m.pi
interval=PN('Interval')
interval=interval<1 and 1 or interval
Vnew=function(x,y,z)
local o={}
o.x=x
o.y=y
o.z=z
return o
end
VAdd=function(a,b)
local o={}
o.x=a.x+b.x
o.y=a.y+b.y
o.z=a.z+b.z
return o
end
VSub=function(a,b)
local o={}
o.x=a.x-b.x
o.y=a.y-b.y
o.z=a.z-b.z
return o
end
VScl=function(a,b)
local o={}
o.x=a*b.x
o.y=a*b.y
o.z=a*b.z
return o
end
QConjugate=function(q)
local o={}
o.x=-q.x
o.y=-q.y
o.z=-q.z
o.w=q.w
return o
end
QMul=function(a,b)
local o,j,k,l,m,n,p,q,r={},a.x,a.y,a.z,a.w,b.x,b.y,b.z,b.w
o.x=m*n-l*p+k*q+j*r
o.y=l*n+m*p-j*q+k*r
o.z=-k*n+j*p+m*q+l*r
o.w=-j*n-k*p-l*q+m*r
return o
end
QMulVec=function(q, v)
local o,N1,N2,N3={},q.x*2,q.y*2,q.z*2
o.x=(((1-(q.y*N2+q.z*N3))*v.x)+((q.x*N2-q.w*N3)*v.y))+((q.x*N3+q.w*N2)*v.z)
o.y=(((q.x*N2+q.w*N3)*v.x)+((1-(q.x*N1+q.z*N3))*v.y))+((q.y*N3-q.w*N1)*v.z)
o.z=(((q.x*N3-q.w*N2)*v.x)+((q.y*N3+q.w*N1)*v.y))+((1-(q.x*N1+q.y*N2))*v.z)
return o
end
QfromEulerZYX=function(e)
local o,cx,sx,cy,sy,cz,sz={},C(0.5*e.x),S(0.5*e.x),C(0.5*e.y),S(0.5*e.y),C(0.5*e.z),S(0.5*e.z)
o.x=sx*cy*cz-cx*sy*sz
o.y=cx*sy*cz+sx*cy*sz
o.z=cx*cy*sz-sx*sy*cz
o.w=sx*sy*sz+cx*cy*cz
return o
end
QtoEulerZXY=function(q)
local sx=2*q.y*q.z+2*q.x*q.w;
local lock=AB(sx)>0.999;
local o={}
if lock then
o.x=AS(sx)
o.y=0
o.z=AT(2*q.x*q.y+2*q.z*q.w, 2*q.w*q.w+2*q.x*q.x-1)
else
o.x=AS(sx)
o.y=AT(-(2*q.x*q.z-2*q.y*q.w), 2*q.w*q.w+2*q.z*q.z-1)
o.z=AT(-(2*q.x*q.y-2*q.z*q.w), 2*q.w*q.w+2*q.y*q.y-1)
end
return o
end
function LocalfromRadar(d,a,e)
local y,w=d*S(e),d*C(e)
local x,z=w*S(a),w*C(a)
return Vnew(x,y,z)
end
RadarPos={}
RadarQ={}
Targets={}
Detected={}
Offset=Vnew(0,0,0)
function onTick()
timeSinceDetection=IN(4)
if timeSinceDetection==0 then
Targets={}
Detected={}
for i=1,8 do
Targets[i]={}
OB(i,false)
ON(3*i-2,0)
ON(3*i-1,0)
ON(3*i,0)
end
RadarPos=Vnew(IN(8),IN(12),IN(16))
RadarQ=QfromEulerZYX(Vnew(IN(20),IN(24),IN(28)))
end
for i=1,8 do
detected=IB(i)
Detected[i]=detected
if detected then
localPos=LocalfromRadar(IN(4*i-3),IN(4*i-2),IN(4*i-1))
localPos=VAdd(localPos,Offset)
AAPos=QMulVec(RadarQ,localPos)
worldPos=VAdd(AAPos,RadarPos)
obj={}
obj.x=worldPos.x
obj.y=worldPos.y
obj.z=worldPos.z
Targets[i][timeSinceDetection+1]=obj
end
end
if timeSinceDetection==interval-1 then
for i=1,8 do
x,y,z=0,0,0
if Detected[i] then
for j=1,interval do
obj=Targets[i][j]
x,y,z=x+obj.x,y+obj.y,z+obj.z
end
x,y,z=x/interval,y/interval,z/interval
end
OB(i,Detected[i])
ON(3*i-2,x)
ON(3*i-1,y)
ON(3*i,z)
end
end
endLuaブロック B
LuaブロックBは、ワールド座標系で入力された目標位置を保持し、マップと重ね合わせてディスプレイに表示しています。 それに留まらず、ディスプレイ上に表示された輝点をタッチすることで、追尾レーダーへ目標位置を送信することができます。
地図上に表示された目標位置をタップすることで追尾レーダーにシームレスに目標情報をハンドオーバーできるのが、以前制作した9K330 トールや現在制作中の23102計画型レーダー装置の強みです。
もちろん、通信上の都合でプレイヤーの操作が同期されない場合に備え、23102計画型追尾レーダー《Sudno》には、プレイヤーがレーダーの指向方位・捕捉状況を直接操作できるモードも用意されています。
-- Saitama Navy project 23102 "Zvezdy" Radar Complex
i,o,p,m,t,s=input,output,property,math,table,screen
IB,IN,OB,ON,PB,PN=i.getBool,i.getNumber,o.setBool,o.setNumber,p.getBool,p.getNumber
S,C,T,AS,AT,AB=m.sin,m.cos,m.tan,m.asin,m.atan,m.abs
pi,pi2=m.pi,2*m.pi
TI,TR=t.insert,t.remove
Color,Text,Line,Rect,RectF,Circle,CircleF,Tri,TriF=s.setColor,s.drawText,s.drawLine,s.drawRect,s.drawRectF,s.drawCircle,s.drawCircleF,s.drawTriangle,s.drawTriangleF
w,h=0,0
centerX,centerY=0,0
touchX,touchY=0,0
GPSX,GPSY,bodyC,radarC=0,0,0
zoom=5
fix,activated,lPressed=true,false,false
Targets={}
zone=32
tgmax=100
tgMinDist=25
searchRange=PN('Search Radar Range')
missileRange=PN('Missile Range')
gunRange=PN('Gun Range')
function Dist3f(x,y,z) return x*x+y*y+z*z end
function Cursor(lx,ly,ux,uy) return touchX>lx and touchX<ux and touchY>ly and touchY<uy end
function onTick()
activated=IB(9)
pressed=IB(10)
GPSX,GPSY=IN(25),IN(26)
bodyC,radarC=IN(27)*pi2,IN(28)*pi2
touchX,touchY=IN(31),IN(32)
OB(1,false)
if pressed then
if not lPressed then
if Cursor(1,h-9,8,h-1) then
fix=true
elseif Cursor(1,1,8,8) then
zoom=m.max(zoom/1.5,0.1)
elseif Cursor(1,9,8,16) then
zoom=m.min(zoom*1.5,50)
else
for k=1,#Displayed do
displayed=Displayed[k]
if Cursor(displayed.x-3,displayed.y-3,displayed.x+3,displayed.y+3) then
ON(1,Targets[displayed.i].x)
ON(2,Targets[displayed.i].y)
ON(3,Targets[displayed.i].z)
OB(1,true)
end
end
end
elseif Cursor(w/2-zone,h/2-zone,w/2+zone,h/2+zone) then
fix=false
centerX,centerY=centerX+(touchX-w/2)*zoom*zone/w,centerY+(h/2-touchY)*zoom*zone/h
end
end
if activated then
for i=1,8 do
if IB(i) and #Targets<tgmax then
x,y,z=IN(3*i-2),IN(3*i-1),IN(3*i)
index=0
minDist=tgMinDist
isNew=true
for j=1,#Targets do
target=Targets[j]
dist=Dist3f(target.x-x,target.y-y,target.z-z)
if dist<minDist then
index=j
minDist=dist
isNew=false
end
end
obj={}
obj.x,obj.y,obj.z,obj.t=x,y,z,70
if isNew then
TI(Targets,obj)
else
Targets[index]=obj
end
else
break
end
end
for j=#Targets,1,-1 do
t=Targets[j].t
Targets[j].t=t-1
if t<1 then TR(Targets,j) end
end
end
if fix then centerX,centerY=GPSX,GPSY end
lPressed=pressed
end
function onDraw()
w = s.getWidth()
h = s.getHeight()
-- draw map
s.setMapColorOcean(5,5,5)
s.setMapColorShallows(10,10,10)
s.setMapColorLand(30,30,30)
s.setMapColorGrass(20,20,20)
s.setMapColorSand(40,40,40)
s.setMapColorSnow(50,50,50)
s.drawMap(centerX,centerY,zoom)
vX,vY=map.mapToScreen(centerX,centerY,zoom,w,h,GPSX,GPSY)
Displayed={}
if activated then
-- render radar range
Color(0,0,255,15)
searchCircle=searchRange*w/(zoom*1000)
CircleF(vX,vY,searchCircle)
Color(0,0,255)
Circle(vX,vY,searchCircle)
Line(vX,vY,searchCircle*S(radarC+pi)+vX,searchCircle*C(radarC+pi)+vY)
for i=1,#Targets do
target=Targets[i]
if target.y >10 then
Color(0,255,0,m.min(target.t*3,255))
else
Color(0,255,255,m.min(target.t*3,255))
end
targetX,targetY=map.mapToScreen(centerX,centerY,zoom,w,h,target.x,target.z)
if targetX>0 and targetX<w and targetY>0 and targetY<h then
obj={}
obj.x,obj.y,obj.i=targetX,targetY,i
TI(Displayed,obj)
Text(targetX-2,targetY-2,"+")
end
end
end
Color(255,0,0)
-- render missile range
missileCircle=missileRange*w/(zoom*1000)
Circle(vX,vY,missileCircle)
gunCircle=gunRange*w/(zoom*1000)
Circle(vX,vY,gunCircle)
-- render vehicle position
CircleF(m.max(m.min(vX,w-2),2),m.max(m.min(vY,h-2),2),2)
TriF(vX,vY,6*S(bodyC+pi2/6)+vX,6*C(bodyC+pi2/6)+vY,6*S(bodyC+pi)+vX,6*C(bodyC+pi)+vY)
TriF(vX,vY,6*S(bodyC-pi2/6)+vX,6*C(bodyC-pi2/6)+vY,6*S(bodyC-pi)+vX,6*C(bodyC-pi)+vY)
-- render button
Color(0,0,0,127)
RectF(1,1,7,7)
RectF(1,9,7,7)
RectF(1,h-8,7,7)
Color(255,255,255)
Text(3,2,"+")
Text(3,10,"-")
Text(3,h-6,"|")
end駆動制御マイコンの概略
現在制作中の9K330 トール、2K22 ツングースカでは、捜索レーダーの指向に先述のDynamic式を採用しています。
この方式でレーダーの回転速度を制御するために、駆動制御マイコンを新たに開発しました。
LuaブロックでVelocity Pivotの回転角度と、端部のローカル角速度を計算してから、角速度をPIDに突っ込み、一定の角速度に管理しています。
設定項目は以下の通りです。
- 走査すべき区間の数
通常、これはレーダーのFOV Xの逆数か、それより少し大きい値にします。
- レーダーの検出間隔
先述の通り、レーダーレンジ(m)を2000で割った値です。
- Oddscan
このうちOddscanは、レーダーを倍速・3倍速で回転させ、走査速度を向上させるための仕組みです。区間数は奇数にするべきです。
Oddscanはレーダーの回転速度が向上するほか、同じ目標を連続して捉えてしまうことが減りますが、高速な目標がレーダーに映らなくなりやすく、一長一短といえます。
Luaブロック C
LuaブロックCの役目は、Velocity Pivotの基部と端部の姿勢を計算し、Ch1に角度の差を、Ch2にPivot端部のローカル角速度を出力することです。 Ch1に出力される数値は、Velocity PivotのCurrent Rotationノードを使って計算した場合と同じになるようになっています。
使用しているコードを掲示します。ライブラリはブロックAと共通です。
AngleNormalize=function(a,b) return (a%1-b%1+2.5)%1-0.5 end
function onTick()
QRadar=QfromEulerZYX(Vnew(IN(1),IN(2),IN(3)))
QBase=QfromEulerZYX(Vnew(IN(7),IN(8),IN(9)))
ERadar=QtoEulerZXY(QRadar)
EBase=QtoEulerZXY(QBase)
AngVelRadar=Vnew(IN(4),IN(5),IN(6))
AngVelRadar=QMulVec(QConjugate(QRadar),AngVelRadar)
difference=AngleNormalize(ERadar.y/pi2,(EBase.y/pi2+0.5))*-5
ON(1,difference)
ON(2,AngVelRadar.y)
end